ArduPilot
ID: 73 Kategorie: CPU
Menge: 0 Position:

 Opis
Rewelacyjny kontroler ArduPilot APM 2.6 z kompasem i GPS. APM 2.6 wszechstronny kontroler, stabilizator, autopilot o bardzo dużych możliwościach.
 Cechy produktu
- Uniwersalne narzędzie do kontroli i stabilizacji lotu dla
- samolotów
- helikopterów
- multicopterów
- oraz samochodów
- Umożliwia
- stabilizacjÄ™ lotu
- auto-powrót
- latanie po waypont
- kontrole lotu przez komputer
- oraz wiele innych
- System ten posiada rewelacyjne i wszechstronne oprogramowanie.
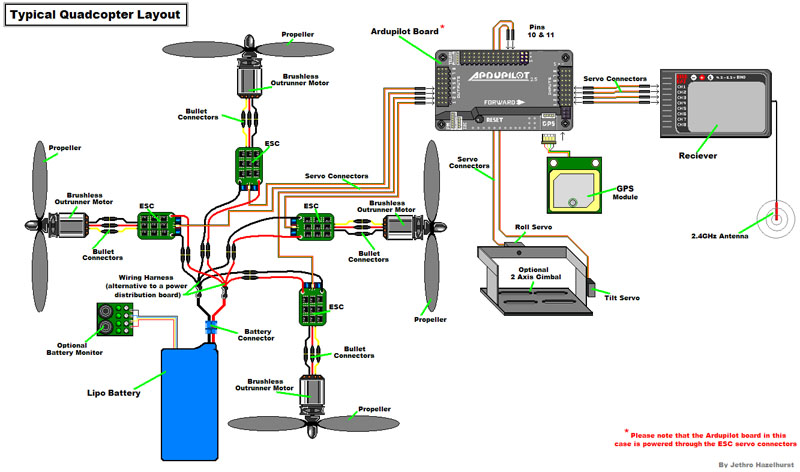
- Dodatkowy czujnik prÄ…du i ukÅ‚ad zasilajÄ…cy POWER MODULE -Â

- Dodatkowe inne elementy uzupeÅ‚niajÄ…ce do APM 2.6 Â

 Opis kontrolera APM 2.6
- ArduPilot APM 2.6 to wysokiej klasy i doskonale wyposażony kontroler lotu o bardzo dużych możliwościach.
- ArduPilot Mega to zaawansowany kontroler lotu, bazujÄ…cy na platformie Arduino Mega wersja 2.6 oparta jest o mikrokontroler Atmel ATMega 2560.
- Projekt zarówno hardware-u jak i software-u jest w pełni OpenSource, dzięki czemu posiada bardzo aktywną społeczność.
- ArduPilotMega jest kontrolerem uniwersalnym.  W zależności od załadowanego kodu pozwala na sterowanie
- wielowirnikowcami i tradycyjnym śmigłowcem (oprogramowanie ArduCopter)
- pojazdami i Å‚odziami (oprogramowanie ArduRover)
- samolotami i szybowcami (oprogramowanie ArduPlane).
- Po podÅ‚Ä…czeniu GPSa  z kompasem mamy mozliwość planowania trasy lotu na komputerze i ustawienia lotu autonomicznego.Â
- Kontroler wraz z oprogramowaniem oferuje pełne wsparcie dla Gimbala.
- Pozwala tez na podłączenie takich czujników jak na przykład czujnik prędkości wiatru czy czujnik zbliżeniowy, kamery itp
- Dzięki modułowi napięcia pozwala na monitorowanie obciążenia i napięcia baterii.
- Po podłączeniu modułu OSD wszystkie te informacje jak i kierunki lotu czy powrotu pokazywane są w czasie rzeczywistym na ekranie monitora.
Â
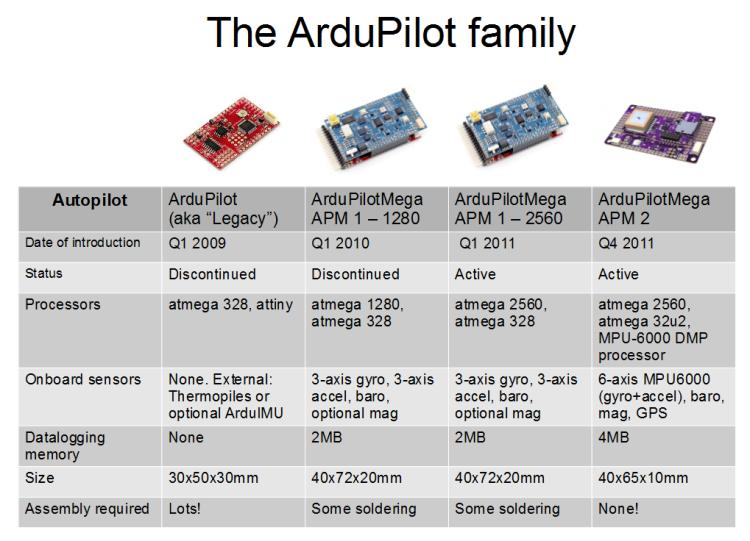
 Wersje kontrolera APM
- Wersja 2.5.2 w stosunku do 2.5 posiada lepszy regulator napięcia 3.3 V (większa wydajność, mniejsze zakłócenia).
- Wersja 2.6 w stosunku do wersji 2.5.2 różni się brakiem magnetometru - musi być dołączony jako czujnik zewnętrzny.  - co sprawia, że wersja ta idealnie nadaje się do użytku w multicopterach i łazikach, gdzie kompas należy umieścić jak najdalej, od źródeł zasilania i silnika, aby uniknąć zakłóceń magnetycznych.
Â
 Specyfikacja techniczna kontrolera APM 2.6
- Procesor: ATMega 2560Â i ATMEGA32U-2
- Czujniki zamontowane:
- 6-osiowy żyroskop i akcelerometr: Invesense MPU-6000Â
- Czujnik ciśnienia atmosferycznego uaktualniony do MS5611-01BA03
- 3-osiowy magnetometr:Â Honeywell HMC5883L-TR
- Czujnik zewnętrzne: GPS, magnetometr, sonar, optical flow sensor, airspeed sensor, MinimOSD, Power Module, radiomodem
- 4MB DataFlash układ automatycznej rejestracji danych.
- Wymiary płyty głównej: 70x44x14mm
- Masa płyty głównej netto: 30g
 Oprogramowanie
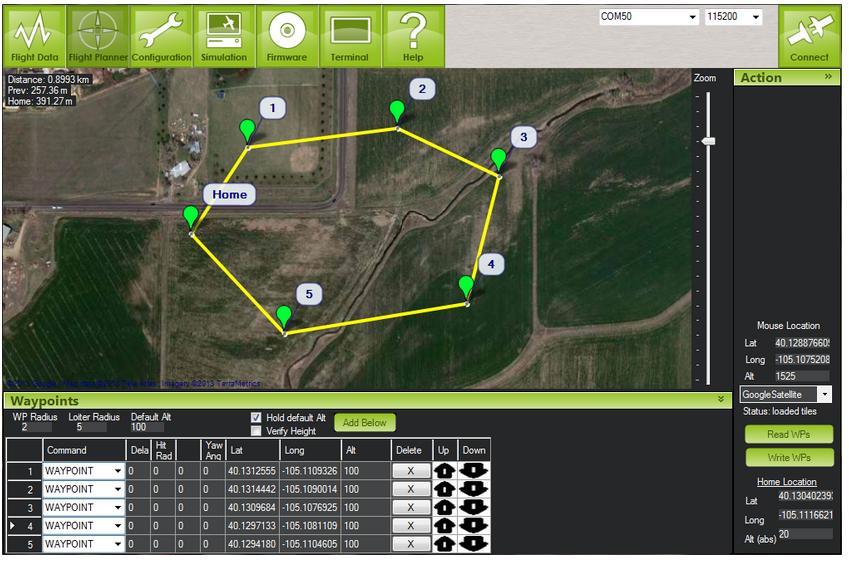
- Kontroler posiada zaawansowany zestaw oprogramowania odpowiedzialnego nie tylko za stabilizację lotu, ale pozwalające także na realizowanie autonomicznych misji w trybie autopilota (możliwość zdefiniowania nieograniczonej liczby waypointów, tryb Return-To-Home).
- Oprogramowanie potrafi komunikować się z urządzeniami zewnętrznymi (OSD, stacja bazowa) za pośrednictwem protokołu MAVLink.
- Do komunikacji ze stacją bazową można wykorzystać szereg mediów, w tym kabel USB i radiomodem działający w paśmie 433 MHz lub 915 MHz.
- Oprogramowanie zapewnia solidną stabilizację lotu w przypadku wielowirnikowców, śmigłowców oraz samolotów.
- Jest to jedno z najbardziej zaawansowanych rozwiązań kierowanych do amatorów, jakie są dostępne obecnie na rynku.
- Najbardziej rozbudowany z programów - Mission Planner, to prawdziwy kombajn, którego główne funkcje to:
- Aktualizacja oprogramowania kontrolera
- Podgląd na żywo parametrów lotu
- Programowanie trasy dla autopilota
- Konfiguracja parametrów oraz diagnostyka kontrolera i czujników zewnętrznych
- Program umożliwia działanie jako interfejs pomiędzy kontrolerem oraz symulatorami lotu (dzięki czemu można odbywać symulowane misje w programa X-Plane oraz FlightGear
- Program umożliwia wykorzystanie urządzeń takich jak joystick, kierownica, pad do sterowania lotem
- Program może działać jako OSD nałożenie wskazań telemetrii na podgląd z kamery zainstalowanej w modelu
- Synteza mowy (odczyty telemetrii przekazywane w formie głosowej)
Â
 Informacje na temat oprogramowania i kontrolera APM 2.6
- kontrolera (autopilota) -Â http://copter.ardupilot.com/wiki/common-apm25-and-26-overview/
- ArduPlane
- ArduCopter
- ArduRover
- http://ardupilot.com/ - Strona główna projektu, zawiera opis możliwości kontrolera, linki do pobrania oprogramowania itp.
- http://diydrones.com/ - Strona skupiająca społeczność użytkowników oraz osób rozwijających APM.
- http://3drobotics.com/ - Producent 'oficjalnego' oryginalnego APM.
- http://3drobotics.com/learn/#APM_26_Autopilot - Garść przydatnych informacji, linki do pobrania oprogramowania.
- http://code.google.com/p/ardupilot-mega/ - Instrukcje dla posiadaczy starszych wersji kontrolera.
Â

Â

 
 Â
 Uwaga
- Kontroler APM nie posiada zabezpieczenia przed niewłaściwym zasilaniem (za wysokie napięcie, odwrotne podłączenie lub niewłaściwa konfiguracja zasilania powodują uszkodzenie kontrolera)
- Nie wolno podłącząć żadnych zewnętrznych urządzeń (radiomodem, OSD, odbiornik RC) jeżeli kontroler zasilane jest z portu USB - doprowadzi to do uszkodzenia regulatora 3,3 V.
- Odwrotne podłączenie wtyczek z odbiornika RC może skutkować uszkodzeniem regulatora
- Nie wolno  zasilać urządzenia jednocześnie za pomocą Power Module APM i regulatorów obrotów - może doprowadzić to do uszkodzenia modułu zasilającego oraz kontrolera. Aby temu zapobiec należy rozłączyć zworkę JP1.
- Nie mozna zasilać serwomechanizmów za pomocą Power Module z APM
- Zwarcie masy i zasilania na wejÅ›ciach lub wyjÅ›ciach pÅ‚ytki doprowadzi do przepalenia diody zabezpieczajÄ…cej Schottkyego i/lub bezpiecznika. Uszkodzeniu ulec może także regulator 3,3V. Â
 Zestaw zawiera
- Kontroler ArduCopter w obudowie
- Przewód do podłączania z odbiornkiem
- GPS z kompasem
 Prezentacja wideo
Â
Problemy
Kontrolery APM nie są niestety pozbawione problemów, większości z nich daje się jednak uniknąć obchodząc się z kontrolerem ostrożnie, zgodnie z instrukcjami dostępnymi w sieci. Głównymi problemami są awarie elektroniki. APM nie posiada dostatecznego zabezpieczenia przed zasilaniem w niewłaściwy sposób (za wysokie napięcie, odwrotne podłączenie lub niewłaściwa konfiguracja zasilania). Częstym problemem jest awaria regulatora napięcia 3,3 V (wyjściowe napięcie 5V zamiast 3,3 V na skutek uszkodzenia elementu), co może skutkować niestabilnym działaniem kontrolera oraz spowodować dalsze uszkodzenia elektroniki. Problem ujawnił się stosunkowo niedawno wraz z nową wersją oprogramowania ArduCopter, która wyśrubowała parametry poszczególnych sensorów. Co więcej w internecie nie ma jasnych wskazówek odnośnie postępowania z kontrolerem (nie podają ich też autorzy projektu) - dość często można trafić na rozbieżne informacje.
Publikujemy jednak kilka pewnych wytycznych co do eksploatacji urządzenia, które pozwolą Wam cieszyć się nim długo:
- Nie należy podłącząć żadnych zewnętrznych urządzeń (radiomodem, OSD, odbiornik RC) kiedy urządzenie zasilane jest z portu USB - doprowadzi to do uszkodzenia regulatora 3,3 V.
- Należy uważnie podłączać wtyczki z odbiornika RC, serwomechanizmów i regulatorów obrotów do płytki - biały (żółty) kabel zawsze do środka płytki. Odwrotne podłączenie może skutkować uszkodzeniem regulatora.
- Nie należy zasilać urządzenia jednocześnie za pomocą Power Module i regulatorów obrotów - może doprowadzić to do uszkodzenia modułu zasilającego oraz kontrolera. Aby temu zapobiec należy rozłączyć zworkę JP1.
- Nie należy zasilać serwomechanizmów za pomocą Power Module (jeśli jest to wymagane - należy rozłączyć zworkę JP1 i zasilać je z innego źródła - np. ESC lub BEC).
- Zwarcie masy i zasilania na wejściach lub wyjściach płytki doprowadzi do przepalenia diody zabezpieczającej Schottkyego i/lub bezpiecznika. Uszkodzeniu ulec może także regulator 3,3V.
- Płytki niektórych producentów są bardziej podatne uszkodzenia od innych - ma tu znaczenie jakość ich wykonania. Sprawdzone źródła kontrolerów to m.in 3DRobotics (oryginalny ArduPilot Mega), HobbyKing (płytka HK Pilot Mega), RC-Timer (ArduFlyer).